Z Skrypty dla studentów Ekonofizyki UPGOW
(→Współrzędne kartezjańskie prostokątne) |
(→Przykłady) |
||
| (Nie pokazano 7 wersji pomiędzy niniejszymi.) | |||
| Linia 1: | Linia 1: | ||
[[Category:KURS MATEMATYKI]] | [[Category:KURS MATEMATYKI]] | ||
| - | == | + | == Wektor == |
| - | + | Wektor można określać na wiele sposobów. Jednym z nich, bardzo przydatnym w fizyce, jest geometryczne określenie wektora. Wyobraźmy sobie linię prostą na której wybrano dwa punkty <math>A</math> i <math>B</math>. Wektorem będziemy nazywać odcinek skierowany <math>AB</math>, którego początkiem jest punkt <math>A</math>, a końcem punkt <math>B</math> ([[Media:wek_def.png|Rys. 1]]). Taki wektor nazywamy wektorem zaczepionym w punkcie <math>A</math> i oznaczamy jako <math>\vec{AB}</math>. | |
| + | [[File:wek_def.png|thumb|300px|Rys. 1 Wektor interpretacja graficzna]] | ||
| - | + | Zbiór wszystkich prostych równoległych do danej prostej tworzy tzw. kierunek, pojęcie to można zdefiniować również w dowolnym punkcie <math>A</math>, wówczas kierunkiem nazywamy prostą należącą do tego zbioru i przechodzącą przez punkt <math>A</math>. | |
| - | + | ||
| - | Wektor | + | Zbiór wszystkich wektorów zaczepionych, które można uzyskać poprzez przesunięcie równoległe danego wektora tworzy pewien obiekt, który nazywamy wektorem swobodnym. Każdy z wektorów tego zbioru nazywamy reprezentantem wektora swobodnego. |
| + | Wektor definiuje pewien kierunek oraz zwrot. Kierunkiem wektora jest zbiór prostych równoległych do wektora, a jego zwrotem nazywamy uporządkowaną parę <math>(A,B)</math> punktów dowolnego reprezentanta. Zauważmy, że dany wektor może mieć dwa zwroty <math>(A,B)</math> i zwrot przeciwny <math>(B,A)</math>. | ||
| + | Dla wektora swobodnego pojęcie zaczepienia traci sens, gdyż w zbiorze jego reprezentantów są wektory zaczepione we wszystkich punktach przestrzeni. | ||
| - | + | O wektorze, którego początek obrazu geometrycznego może być dowolnie obrany w przestrzeni mówimy, że jest swobodny. Wektory takie można przesuwać równolegle bez zmiany ich znaczenia ([[Media:prze1.png|Rys. 2]]). Natomiast wektor, którego obraz geometryczny ma początek w ścisłe określonym punkcie nazywamy wektorem zaczepionym lub związanym ([[Media:wek_ukl1.png|Rys. 3]]). | |
| + | [[File:prze1.png|thumb|300px|Rys. 2 Przesunięcie równoległe wektora]] | ||
| + | [[File:wek_ukl1.png|thumb|300px|Rys. 3 Wektor związany o początku w punkcie <math>O</math>]] | ||
| - | + | === Długość wektora === | |
| + | Długością wektora <math>\mathbf a</math> nazywamy długość odcinka jego dowolnego reprezentanta, którą oznaczamy jako <math>|\textbf{a}|,</math> przy czym oznaczenia tego nie należy mylić z wartością bezwzględną. Jest ona zawsze liczbą nieujemną. Wektor, którego długość wynosi jeden nazywamy wektorem jednostkowym. | ||
| - | <math>\ | + | === Suma i różnica wektorów === |
| + | Opierając się na [[Media:wek_sr.png|Rys. 4]] możemy powiedzieć, że sumą wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> nazywamy wektor <math>\textbf{c}</math>, który przedstawia przesunięcie wypadkowe przy złożeniu (kolejnym wykonaniu) przesunięć o wektory <math>\textbf{a}</math> i <math>\textbf{b}</math> | ||
| + | <!-- | ||
| + | który uzyskujemy jako przesunięcie wypadkowe wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> | ||
| + | --> | ||
| + | :<math>\textbf{c}=\textbf{a}+\textbf{b}</math> | ||
| - | + | Dla sumy wektorów spełnione jest prawo przemienności, co także widać na [[Media:wek_sr.png|Rys. 4]] | |
| - | + | :<math>\textbf{a}+\textbf{b}=\textbf{b}+\textbf{a}</math> | |
| + | [[File:wek_sr.png|thumb|300px|Rys. 4 Suma i różnica wektorów]] | ||
| - | + | Aby mówić o różnicy wektorów należy najpierw określić wektor przeciwny. Przez wektor przeciwny do wektora <math>\textbf{a}</math> rozumiemy wektor, który ma tę samą długość co wektor <math>\textbf{a}</math>, a zwrot przeciwny. Oznaczamy go symbolem <math>\textbf{-a}</math>. Odejmowanie wektora <math>\textbf{b}</math> od <math>\textbf{a}</math> rozumiemy jako dodanie wektora przeciwnego <math>\textbf{-b}</math> do wektora <math>\textbf{a}</math> (patrz [[Media:wek_sr.png|Rys. 4]]). | |
| - | + | ||
| - | [[ | + | |
| - | == | + | === Mnożenie wektora przez liczbę === |
| - | + | Jeżeli <math>\alpha</math> jest liczbą dodatnią, a <math>\textbf{a}</math> jest wektorem to przez <math>\alpha \textbf{a}</math> rozumiemy wektor, który ma ten sam kierunek i zwrot co wektor <math>\textbf{a}</math>, a jego długość wynosi <math>\alpha |\textbf{a}|</math>. | |
| - | + | Jeżeli <math>\alpha</math> jest liczbą ujemną, a <math>\textbf{a}</math> jest wektorem to przez <math>\alpha \textbf{a}</math> rozumiemy wektor, który ma ten sam kierunek lecz zwrot przeciwny do wektora <math>\textbf{a}</math>, a jego długość wynosi <math>\alpha |\textbf{a}|</math>. | |
| - | + | Ponadto wektor <math>\alpha \textbf{a}</math> jest wektorem zerowym gdy <math>\alpha = 0</math>. Przez wektor zerowy rozumiemy wektor, którego początek i koniec pokrywają się. | |
| - | + | ||
| - | + | ||
| - | + | === Liniowa zależność wektorów === | |
| - | + | Dwa wektory, z których jeden powstaje z drugiego przez pomnożenie przez jakąś liczbę nazywamy liniowo zależnymi. Ponadto z reguły mnożenia wektora przez liczbę wynika, że dwa niezerowe liniowo zależne wektory są równoległe. I odwrotnie, każde dwa niezerowe wektory równoległe są liniowo zależne. | |
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | Powyższe określenie liniowej zależności dwóch wektorów można uogólnić na więcej niż dwa wektory. Powiemy, że między <math>n</math> wektorami <math>\textbf{a}_1,\textbf{a}_2\ldots\textbf{a}_n</math> istnieje zależność liniowa jeżeli istnieje <math>n</math> takich liczb <math>\alpha_1,\alpha_2\ldots\alpha_n</math> z których nie wszystkie są równe zeru, a dla których zachodzi zależność: | |
| - | + | :<math>\alpha_1\,\textbf{a}_1+\alpha_2\,\textbf{a}_2+\ldots+\alpha_n\,\textbf{a}_n=\textbf{0}</math> | |
| - | + | Wektory dla których nie zachodzi powyższa zależność nazywamy wektorami liniowo niezależnymi. | |
| - | + | ||
| - | + | ||
| - | + | === Iloczyn skalarny wektorów === | |
| + | Iloczynem skalarnym niezerowych wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> nazywamy liczbę, którą jest iloczyn długości tych wektorów przez cosinus kąta <math>\varphi</math> zawartego między nimi. Iloczyn skalarny oznaczamy przez <math>\mathbf a \cdot \mathbf b</math>, a więc | ||
| + | :<math>\mathbf{a}\cdot\mathbf{b}=|\textbf{a}||\textbf{b}|\cos{\varphi}</math> | ||
| - | + | Gdy choć jeden z tych wektorów jest zerowy ich iloczyn skalarny jest równy zero. Ponadto należy podkreślić, że iloczyn skalarny wektorów jest liczbą, a nie wektorem. | |
| - | + | === Iloczyn wektorowy wektorów === | |
| + | Iloczynem wektorowym <math>\textbf{a} \times \textbf{b}</math> niezerowych i nierównoległych wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> nazywamy wektor <math>\textbf{c}</math>, którego długość wynosi: | ||
| - | <math>\textbf{ | + | :<math>|\textbf{c}|=|\textbf{a}||\textbf{b}|\sin{\varphi}</math> |
| - | gdzie <math>\ | + | gdzie kąt <math>\varphi</math> jest mierzony od wektora <math>\textbf{a}</math> do wektora <math>\textbf{b}</math> w taki sposób, że <math>0 \leq \varphi \leq \pi</math>. Wektor <math>\textbf{c}</math> ma kierunek prostopadły do płaszczyzny wyznaczonej przez wektory <math>\mathbf{a}</math> i <math>\mathbf{b}</math> oraz jest tak zorientowany, że wektory <math>\textbf{a}, \textbf{b}, \textbf{c}</math> tworzą układ prawoskrętny. |
| - | + | Gdy wektory <math>\textbf{a}</math> i <math>\textbf{b}</math> są równoległe albo choć jeden z nich jest zerowy, to ich iloczyn wektorowy jest wektorem zerowym. | |
| - | + | ||
| - | + | ||
| - | <math> | + | Pojęcie prawoskrętnego układu jest związane z wzajemnym położeniem trzech osi w kartezjańskim układzie współrzędnych. Otóż osie <math>Ox</math> i <math>Oy</math> tworzą pewną płaszczyznę. Trzecia oś <math>Oz</math> jest prostopadła do płaszczyzny <math>Oxy</math> i może być wybrana na dwa sposoby ([[Media:wek_pl.png|Rys. 5]]). Wybór ten jednoznacznie definiuje typ układu: lewoskrętny ([[Media:wek_lew.png|Rys. 5a]]) lub prawoskrętny ([[Media:wek_pra.png|Rys. 5b]]). |
| + | [[File:wek_pl.png|thumb|300px|Rys. 5 Wybór osi '''''Oz''''']] | ||
| + | [[File:wek_lew.png|thumb|300px|Rys. 5a Układ lewoskrętny]] | ||
| + | [[File:wek_pra.png|thumb|300px|Rys. 5b Układ prawoskrętny ]] | ||
| - | + | === Niektóre pożyteczne własności iloczynów wektorów === | |
| + | * <math>\textbf{a} \cdot \textbf{b}=\textbf{b}\cdot\textbf{a}</math> prawo przemienności dla iloczynu skalarnego, | ||
| + | * <math>\alpha (\textbf{a}\cdot\textbf{b})=(\alpha \textbf{a})\cdot \textbf{b}= \textbf{a}\cdot (\alpha \textbf{b})</math>, | ||
| + | * <math>\alpha (\textbf{a} \times \textbf{b}) = (\alpha \textbf{a}) \times \textbf{b}=\textbf{a}\times (\alpha \textbf{b})</math>, | ||
| + | * <math>\textbf{a}\cdot(\textbf{b}+\textbf{c}) = \textbf{a}\cdot\textbf{b} + \textbf{a}\cdot\textbf{c}</math>, | ||
| + | * <math> \textbf{a} \times (\textbf{b} + \textbf{c}) = \textbf{a} \times \textbf{b} + \textbf{a} \times \textbf{c}</math>, | ||
| + | * <math>\textbf{a}\cdot\textbf{b} = 0</math> jeżeli <math>\textbf{a} \bot \textbf{b}</math> (warunek prostopadłości wektorów), | ||
| + | * <math> \textbf{a}\cdot\textbf{a} = \textbf{a}^{2} = |\textbf{a}|^{2} </math>, | ||
| + | * <math>\textbf{b}\times\textbf{a}=-\textbf{a}\times\textbf{b}</math> | ||
| + | * <math>\textbf{a}\times\textbf{a}=0</math> | ||
| - | <math>\ | + | == Wektor w kartezjańskim prostokątnym układzie współrzędnych == |
| + | === Składowe wektora w kartezjańskim prostokątnym układzie współrzędnych === | ||
| + | [[File:wek1.png|thumb|300px|Rys. 6 Wektor w kartezjańskim układzie współrzędnych]] | ||
| + | [[File:wek_prze.png|thumb|300px|Rys. 7 Przesunięcie równoległe wektora]] | ||
| + | W kartezjańskim prostokątnym układzie współrzędnych możemy określić trzy wektory nazywane wektorami podstawowymi lub wersorami, które są wektorami jednostkowymi umieszczonymi na dodatnich osiach układu współrzędnych i wychodzą z początku tego układu. Wektory takie będziemy oznaczać <math>\mathbf{\widehat{x}}, \mathbf{\widehat{y}}, \mathbf{\widehat{z}}</math> ([[Media:wek1.png|Rys. 6]]). | ||
| + | Jeżeli w układzie współrzędnych wybierzemy punkt <math>P</math> o współrzędnych <math>(x,y,z)</math> ([[Media:wek1.png|Rys. 6]]) to wektor <math>\vec{OP}</math> jest równy sumie trzech wektorów <math>\vec{OA},\vec{AB},\vec{BP}</math>, gdzie | ||
| + | :<math> \vec{OA}=a_{x}\mathbf{\widehat{x}}</math> | ||
| + | :<math> \vec{AB}=a_{y}\mathbf{\widehat{y}}</math> | ||
| + | :<math> \vec{BP}=a_{z}\mathbf{\widehat{z}}</math> | ||
| - | + | Podobnie, każdy wektor <math>\textbf{a}</math> w kartezjańskiej przestrzeni trójwymiarowej można wyrazić przez wektory podstawowe <math>\mathbf{\widehat{x}}, \mathbf{\widehat{y}}, \mathbf{\widehat{z}}</math> | |
| + | |||
| + | :<math>\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}},</math> | ||
| - | + | gdzie liczby <math>a_{x},a_{y},a_{z}</math> są współrzędnymi lub składowymi wektora w układzie współrzędnych ([[Media:wek1.png|Rys. 6]]). | |
| - | + | Współrzędne te są miarami rzutów wektora na osie współrzędnych <math>Ox, Oy, Oz</math>, przy czym przesunięcie równoległe wektora nie zmienia wartości jego współrzędnych ([[Media:wek_prze.png|Rys. 7]]). | |
| - | + | ||
| - | + | ||
| - | + | ||
| - | </math> | + | |
| - | + | Długość wektora <math>\mathbf a</math> o składowych <math>a_x, a_y, a_z</math> może być obliczona z następującego wzoru | |
| - | :<math> | + | :<math>|\mathbf a| = \sqrt{a_x^2 + a_y^2 + a_z^2}.</math> |
| - | + | ||
| - | + | ||
| - | + | ||
| - | </math> | + | |
| - | == | + | === Suma i różnica wektorów === |
| - | + | Sumą wektorów <math>\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}</math> i <math>\textbf{b}=b_{x}\mathbf{\widehat{x}}+b_{y}\mathbf{\widehat{y}}+b_{z}\mathbf{\widehat{z}}</math> jest wektor <math>\textbf{c}</math> dany wzorem | |
| - | + | ||
| - | :<math> | + | :<math>\textbf{c}=c_{x}\mathbf{\widehat{x}}+c_{y}\mathbf{\widehat{y}}+c_{z}\mathbf{\widehat{z}}=(a_{x}+b_{x})\mathbf{\widehat{x}}+(a_{y}+b_{y})\mathbf{\widehat{y}}+(a_{z}+b_{z})\mathbf{\widehat{z}}</math> |
| - | + | Różnicą wektorów <math>\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}</math> i <math>\textbf{b}=b_{x}\mathbf{\widehat{x}}+b_{y}\mathbf{\widehat{y}}+b_{z}\mathbf{\widehat{z}}</math> jest wektor <math>\textbf{d}</math> dany wzorem | |
| - | + | :<math>\textbf{d}=d_{x}\mathbf{\widehat{x}}+d_{y}\mathbf{\widehat{y}}+d_{z}\mathbf{\widehat{z}}=(a_{x}-b_{x})\mathbf{\widehat{x}}+(a_{y}-b_{y})\mathbf{\widehat{y}}+(a_{z}-b_{z})\mathbf{\widehat{z}}</math> | |
| - | :<math>\mathbf a \cdot \mathbf b = a_x b_x + a_y b_y + a_z b_z</math> | + | === Mnożenie wektora przez liczbę === |
| + | |||
| + | Polega na pomnożeniu każdej składowej wektora przez tę liczbę. Iloczyn wektora <math>\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}</math> przez liczbę <math>\alpha</math> wynosi | ||
| + | |||
| + | :<math>\alpha \textbf{a} = \alpha (a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}) = \alpha a_{x}\mathbf{\widehat{x}}+ \alpha a_{y}\mathbf{\widehat{y}}+ \alpha a_{z}\mathbf{\widehat{z}}</math> | ||
| + | |||
| + | === Iloczyn skalarny wektorów === | ||
| + | W postaci algebraicznej iloczyn skalarny wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> jest sumą iloczynów składowych każdego z wektorów: | ||
| + | |||
| + | :<math>\mathbf a \cdot \mathbf b = a_x b_x + a_y b_y + a_z b_z</math> | ||
| + | |||
| + | Opierając się na iloczynie skalarnym możemy przedstawić długość wektora jako równą pierwiastkowi kwadratowemu z iloczynu skalarnego wektora przez siebie | ||
| + | |||
| + | :<math>|\mathbf a| = \sqrt{\mathbf a \cdot \mathbf a}</math> | ||
=== Iloczyn wektorowy wektorów === | === Iloczyn wektorowy wektorów === | ||
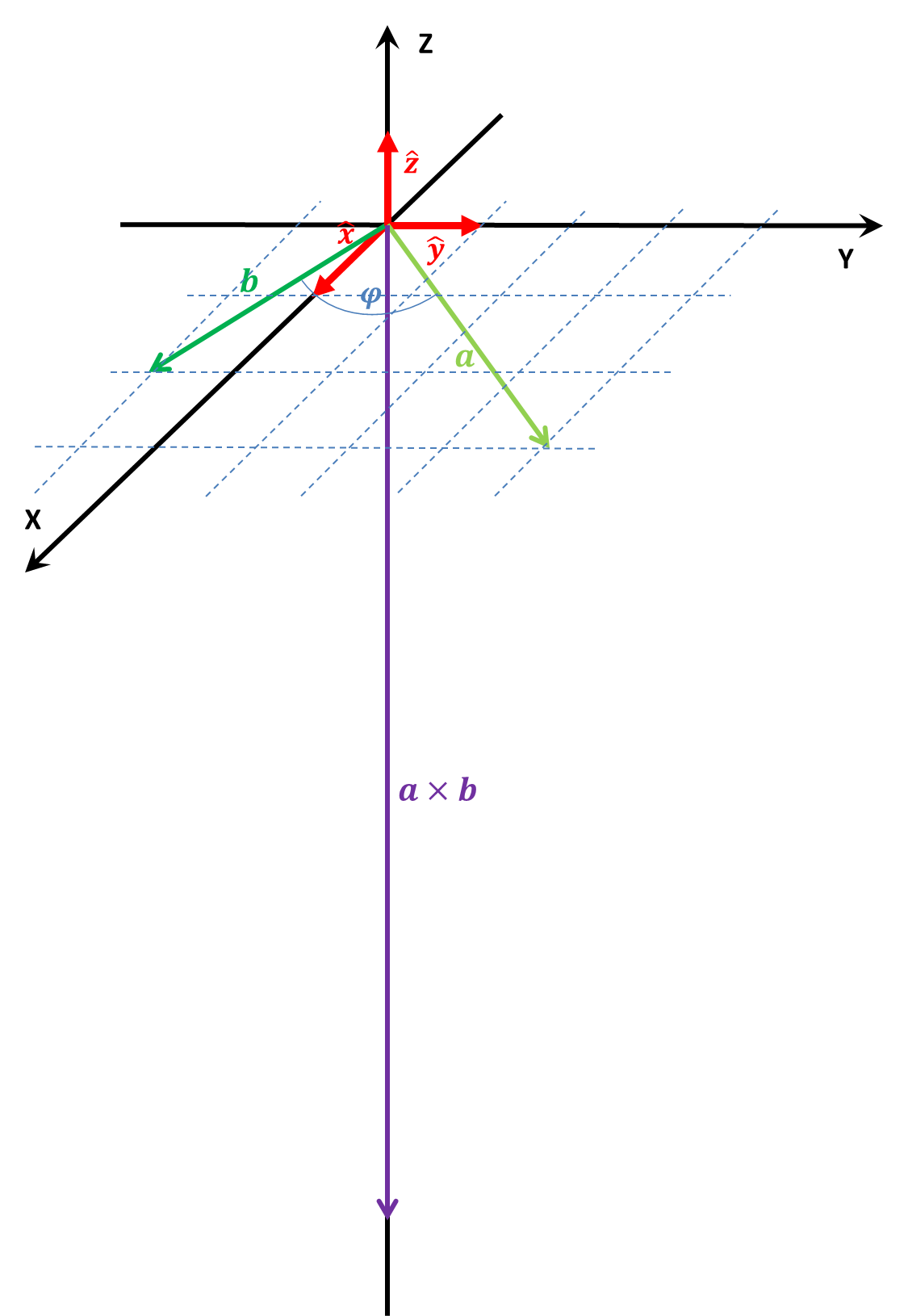
| - | + | [[File:wiw.png|thumb|300px|Rys. 8 Iloczyn wektorowy wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> w kartezjańskim układzie współrzędnych]] | |
| + | W postaci algebraicznej iloczyn wektorowy wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> jest określany jako: | ||
| - | :<math> | + | :<math>\textbf{a} \times \textbf{b} = (a_y b_z - a_z b_y)\mathbf{\widehat{x}} + (a_z b_x - a_x b_z)\mathbf{\widehat{y}} + (a_x b_y - a_y b_x)\mathbf{\widehat{z}}= |
| + | \left| \begin{array}{ccc} | ||
| + | \mathbf{\widehat{x}} & \mathbf{\widehat{y}} & \mathbf{\widehat{z}}\\ | ||
| + | a_{x} & a_{y} & a_{z} \\ | ||
| + | b_{x} & b_{y} & b_{z} \\ | ||
| + | \end{array} \right|</math> | ||
| - | + | gdzie wyznacznik jest wyliczony przez rozwinięcie względem pierwszego wiersza. | |
| - | + | Graficzna prezentacja iloczynu wektorowego znajduje się na [[Media:wiw.png|Rys. 8]]. | |
| - | :<math>\textbf{a} \ | + | == Przykłady == |
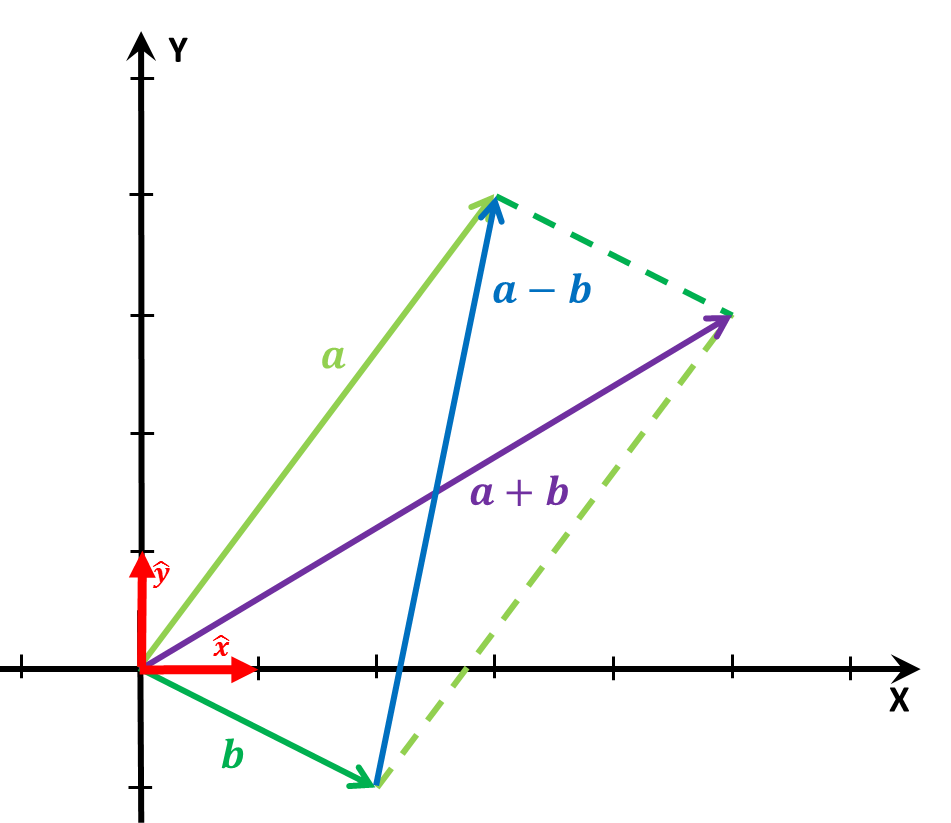
| + | [[File:wprz1.png|thumb|300px|Rys. 9 Suma i róznica wektorów <math>\textbf{a}=3\mathbf{\widehat{x}+4\mathbf{\widehat{y}}}</math> i <math>\textbf{b}=2\mathbf{\widehat{x}-\mathbf{\widehat{y}}}</math> | ||
| + | ]] | ||
| + | [[File:wprz2.png|thumb|300px|Rys. 10 Iloczyn wektorowy wektora <math>\textbf{a}=3\mathbf{\widehat{x}+4\mathbf{\widehat{y}}}</math> i <math>\textbf{b}=2\mathbf{\widehat{x}-\mathbf{\widehat{y}}}</math> | ||
| + | ]] | ||
| + | Mamy dane dwa wektory | ||
| - | + | <math>\textbf{a}=3\mathbf{\widehat{x}}+4\mathbf{\widehat{y}}</math> | |
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | <math>\textbf{b}=2\mathbf{\widehat{x}}-\mathbf{\widehat{y}}</math> | |
| - | + | ||
| - | + | Można zauważyć, że składowa w kierunku osi <math>\textbf{Z}</math> obu wektorów jest równa zero. | |
| - | + | * Długości wektorów <math>\textbf{a}</math> i <math>\textbf{b}</math> wynoszą | |
| - | + | <math>|\mathbf a| = \sqrt{3^2 + 4^2}=\sqrt{25}=5</math> | |
| - | + | <math>|\mathbf b| = \sqrt{2^2 + (-1)^2}=\sqrt{5}</math> | |
| - | :<math> | + | * Suma tych wektorów wynosi (patrz [[Media:wprz1.png|Rys. 9]]) |
| + | <math>\textbf{a}+\textbf{b}=(3+2)\mathbf{\widehat{x}}+(4+(-1))\mathbf{\widehat{y}}=5\mathbf{\widehat{x}}+3\mathbf{\widehat{y}}</math> | ||
| + | * ich różnica (patrz [[Media:wprz1.png|Rys. 9]]) | ||
| + | <math>\textbf{a}-\textbf{b}=(3-2)\mathbf{\widehat{x}}+(4-(-1))\mathbf{\widehat{y}}=\mathbf{\widehat{x}}+5\mathbf{\widehat{y}}</math> | ||
| + | *iloczyn skalarny | ||
| + | <math>\mathbf a \cdot \mathbf b = 3\cdot 2 + 4 \cdot (-1)=2</math> | ||
| + | *a iloczyn wektorowy (patrz [[Media:wprz2.png|Rys. 10]]) | ||
| + | <math>\textbf{a} \times \textbf{b} = (4 \cdot 0 - 0 \cdot (-1))\mathbf{\widehat{x}} + (0 \cdot 2 - 3 \cdot 0)\mathbf{\widehat{y}} + (3 \cdot (-1) - 4 \cdot 2)\mathbf{\widehat{z}}=-11\mathbf{\widehat{z}}</math> | ||
== Zadania == | == Zadania == | ||
| - | # Czy wektory <math>\ | + | # Czy wektory <math>\vec{AB}</math> i <math>\vec{CD}</math> gdzie <math> A =(2,-1), B=(2,1), C=(3,-2), D=(-3,-2)</math> są przeciwne? |
| - | # Czy wektory <math>\ | + | # Czy wektory <math>\vec{AB}</math> i <math>\vec{CD}</math> gdzie <math> A =(2,-1), B=(-2,-2), C=(1,-1), D=(1,2)</math> są równe? |
# Oblicz długości boków trójkąta o wierzchołkach <math>A=(1,-1,2), B=(3,3,8), C=(2,0,1)</math>. | # Oblicz długości boków trójkąta o wierzchołkach <math>A=(1,-1,2), B=(3,3,8), C=(2,0,1)</math>. | ||
| - | # Jeżeli <math>A = (2, -1), B = (-1, 3), C = (0, 1)</math>, wyraź następujące wektory w układzie opartym na wektorach jednostkowych <math>\widehat{ | + | # Jeżeli <math>A = (2, -1), B = (-1, 3), C = (0, 1)</math>, wyraź następujące wektory w układzie opartym na wektorach jednostkowych <math>\mathbf{\widehat{x}},\mathbf{\widehat{y}}</math>: |
| - | ## <math>\ | + | ## <math>\vec{AB}</math>, |
| - | ## <math>\ | + | ## <math>\vec{BC}</math>, |
| - | ## <math>\ | + | ## <math>\vec{AC}</math>, |
| - | ## <math>\ | + | ## <math>\vec{AB}+\vec{BC}</math>, |
| - | ## <math>2\ | + | ## <math>2\vec{AC}-3\vec{BC}</math>, |
| - | # Jeżeli <math>\textbf{a} = 2\widehat{ | + | # Jeżeli <math>\textbf{a} = 2\mathbf{\widehat{x}} + \mathbf{\widehat{y}} -2\mathbf{\widehat{z}}</math> i <math>\textbf{b} = 3\mathbf{\widehat{x}} - 2\mathbf{\widehat{y}} - \mathbf{\widehat{z}} </math> znajdź: |
## <math>\textbf{a} + \textbf{b}</math>, | ## <math>\textbf{a} + \textbf{b}</math>, | ||
## <math>\textbf{a} - \textbf{b}</math>, | ## <math>\textbf{a} - \textbf{b}</math>, | ||
| Linia 144: | Linia 181: | ||
## <math>|\textbf{b}|</math>. | ## <math>|\textbf{b}|</math>. | ||
# Pokaż, że: | # Pokaż, że: | ||
| - | ## <math>\widehat{ | + | ## <math>\mathbf{\widehat{x}} \times \mathbf{\widehat{x}} = \textbf{0} </math>, |
| - | ## <math>\widehat{ | + | ## <math>\mathbf{\widehat{x}} \times \mathbf{\widehat{y}} = \mathbf{\widehat{z}} </math>, |
| - | ## <math>\widehat{ | + | ## <math>\mathbf{\widehat{y}} \times \mathbf{\widehat{x}} = -\mathbf{\widehat{z}} </math>, |
Aktualna wersja na dzień 09:28, 31 mar 2015
Spis treści |
Wektor
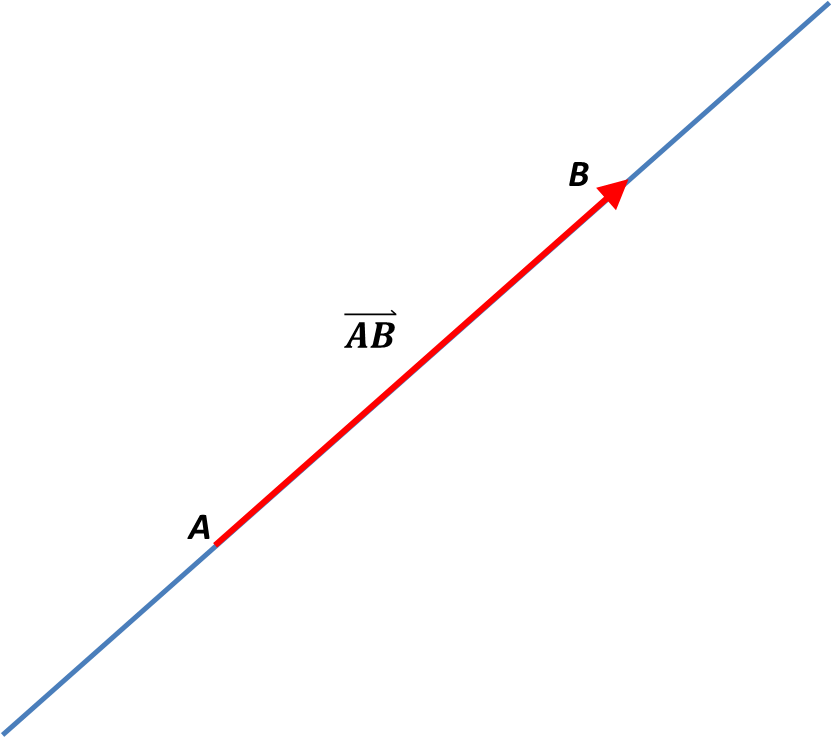
Wektor można określać na wiele sposobów. Jednym z nich, bardzo przydatnym w fizyce, jest geometryczne określenie wektora. Wyobraźmy sobie linię prostą na której wybrano dwa punkty \(A\) i \(B\). Wektorem będziemy nazywać odcinek skierowany \(AB\), którego początkiem jest punkt \(A\), a końcem punkt \(B\) (Rys. 1). Taki wektor nazywamy wektorem zaczepionym w punkcie \(A\) i oznaczamy jako \(\vec{AB}\).
{kind=link}

Zbiór wszystkich prostych równoległych do danej prostej tworzy tzw. kierunek, pojęcie to można zdefiniować również w dowolnym punkcie \(A\), wówczas kierunkiem nazywamy prostą należącą do tego zbioru i przechodzącą przez punkt \(A\).
Zbiór wszystkich wektorów zaczepionych, które można uzyskać poprzez przesunięcie równoległe danego wektora tworzy pewien obiekt, który nazywamy wektorem swobodnym. Każdy z wektorów tego zbioru nazywamy reprezentantem wektora swobodnego. Wektor definiuje pewien kierunek oraz zwrot. Kierunkiem wektora jest zbiór prostych równoległych do wektora, a jego zwrotem nazywamy uporządkowaną parę \((A,B)\) punktów dowolnego reprezentanta. Zauważmy, że dany wektor może mieć dwa zwroty \((A,B)\) i zwrot przeciwny \((B,A)\). Dla wektora swobodnego pojęcie zaczepienia traci sens, gdyż w zbiorze jego reprezentantów są wektory zaczepione we wszystkich punktach przestrzeni.
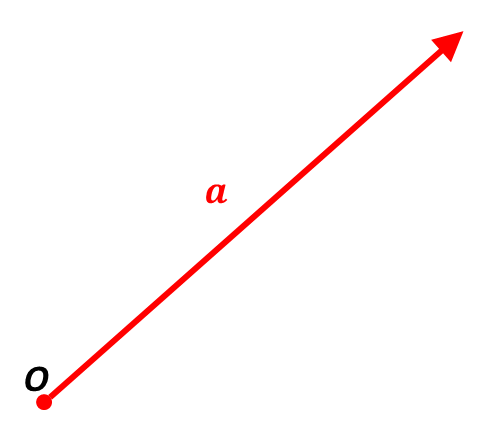
O wektorze, którego początek obrazu geometrycznego może być dowolnie obrany w przestrzeni mówimy, że jest swobodny. Wektory takie można przesuwać równolegle bez zmiany ich znaczenia (Rys. 2). Natomiast wektor, którego obraz geometryczny ma początek w ścisłe określonym punkcie nazywamy wektorem zaczepionym lub związanym (Rys. 3).
{kind=link}
{kind=link}


Długość wektora
Długością wektora \(\mathbf a\) nazywamy długość odcinka jego dowolnego reprezentanta, którą oznaczamy jako \(|\textbf{a}|,\) przy czym oznaczenia tego nie należy mylić z wartością bezwzględną. Jest ona zawsze liczbą nieujemną. Wektor, którego długość wynosi jeden nazywamy wektorem jednostkowym.
Suma i różnica wektorów
Opierając się na Rys. 4 możemy powiedzieć, że sumą wektorów \(\textbf{a}\) i \(\textbf{b}\) nazywamy wektor \(\textbf{c}\), który przedstawia przesunięcie wypadkowe przy złożeniu (kolejnym wykonaniu) przesunięć o wektory \(\textbf{a}\) i \(\textbf{b}\) \[\textbf{c}=\textbf{a}+\textbf{b}\]
{kind=link}
Dla sumy wektorów spełnione jest prawo przemienności, co także widać na Rys. 4 \[\textbf{a}+\textbf{b}=\textbf{b}+\textbf{a}\]

Aby mówić o różnicy wektorów należy najpierw określić wektor przeciwny. Przez wektor przeciwny do wektora \(\textbf{a}\) rozumiemy wektor, który ma tę samą długość co wektor \(\textbf{a}\), a zwrot przeciwny. Oznaczamy go symbolem \(\textbf{-a}\). Odejmowanie wektora \(\textbf{b}\) od \(\textbf{a}\) rozumiemy jako dodanie wektora przeciwnego \(\textbf{-b}\) do wektora \(\textbf{a}\) (patrz Rys. 4).
Mnożenie wektora przez liczbę
Jeżeli \(\alpha\) jest liczbą dodatnią, a \(\textbf{a}\) jest wektorem to przez \(\alpha \textbf{a}\) rozumiemy wektor, który ma ten sam kierunek i zwrot co wektor \(\textbf{a}\), a jego długość wynosi \(\alpha |\textbf{a}|\).
Jeżeli \(\alpha\) jest liczbą ujemną, a \(\textbf{a}\) jest wektorem to przez \(\alpha \textbf{a}\) rozumiemy wektor, który ma ten sam kierunek lecz zwrot przeciwny do wektora \(\textbf{a}\), a jego długość wynosi \(\alpha |\textbf{a}|\).
Ponadto wektor \(\alpha \textbf{a}\) jest wektorem zerowym gdy \(\alpha = 0\). Przez wektor zerowy rozumiemy wektor, którego początek i koniec pokrywają się.
Liniowa zależność wektorów
Dwa wektory, z których jeden powstaje z drugiego przez pomnożenie przez jakąś liczbę nazywamy liniowo zależnymi. Ponadto z reguły mnożenia wektora przez liczbę wynika, że dwa niezerowe liniowo zależne wektory są równoległe. I odwrotnie, każde dwa niezerowe wektory równoległe są liniowo zależne.
Powyższe określenie liniowej zależności dwóch wektorów można uogólnić na więcej niż dwa wektory. Powiemy, że między \(n\) wektorami \(\textbf{a}_1,\textbf{a}_2\ldots\textbf{a}_n\) istnieje zależność liniowa jeżeli istnieje \(n\) takich liczb \(\alpha_1,\alpha_2\ldots\alpha_n\) z których nie wszystkie są równe zeru, a dla których zachodzi zależność: \[\alpha_1\,\textbf{a}_1+\alpha_2\,\textbf{a}_2+\ldots+\alpha_n\,\textbf{a}_n=\textbf{0}\] Wektory dla których nie zachodzi powyższa zależność nazywamy wektorami liniowo niezależnymi.
Iloczyn skalarny wektorów
Iloczynem skalarnym niezerowych wektorów \(\textbf{a}\) i \(\textbf{b}\) nazywamy liczbę, którą jest iloczyn długości tych wektorów przez cosinus kąta \(\varphi\) zawartego między nimi. Iloczyn skalarny oznaczamy przez \(\mathbf a \cdot \mathbf b\), a więc \[\mathbf{a}\cdot\mathbf{b}=|\textbf{a}||\textbf{b}|\cos{\varphi}\]
Gdy choć jeden z tych wektorów jest zerowy ich iloczyn skalarny jest równy zero. Ponadto należy podkreślić, że iloczyn skalarny wektorów jest liczbą, a nie wektorem.
Iloczyn wektorowy wektorów
Iloczynem wektorowym \(\textbf{a} \times \textbf{b}\) niezerowych i nierównoległych wektorów \(\textbf{a}\) i \(\textbf{b}\) nazywamy wektor \(\textbf{c}\), którego długość wynosi:
\[|\textbf{c}|=|\textbf{a}||\textbf{b}|\sin{\varphi}\]
gdzie kąt \(\varphi\) jest mierzony od wektora \(\textbf{a}\) do wektora \(\textbf{b}\) w taki sposób, że \(0 \leq \varphi \leq \pi\). Wektor \(\textbf{c}\) ma kierunek prostopadły do płaszczyzny wyznaczonej przez wektory \(\mathbf{a}\) i \(\mathbf{b}\) oraz jest tak zorientowany, że wektory \(\textbf{a}, \textbf{b}, \textbf{c}\) tworzą układ prawoskrętny.
Gdy wektory \(\textbf{a}\) i \(\textbf{b}\) są równoległe albo choć jeden z nich jest zerowy, to ich iloczyn wektorowy jest wektorem zerowym.
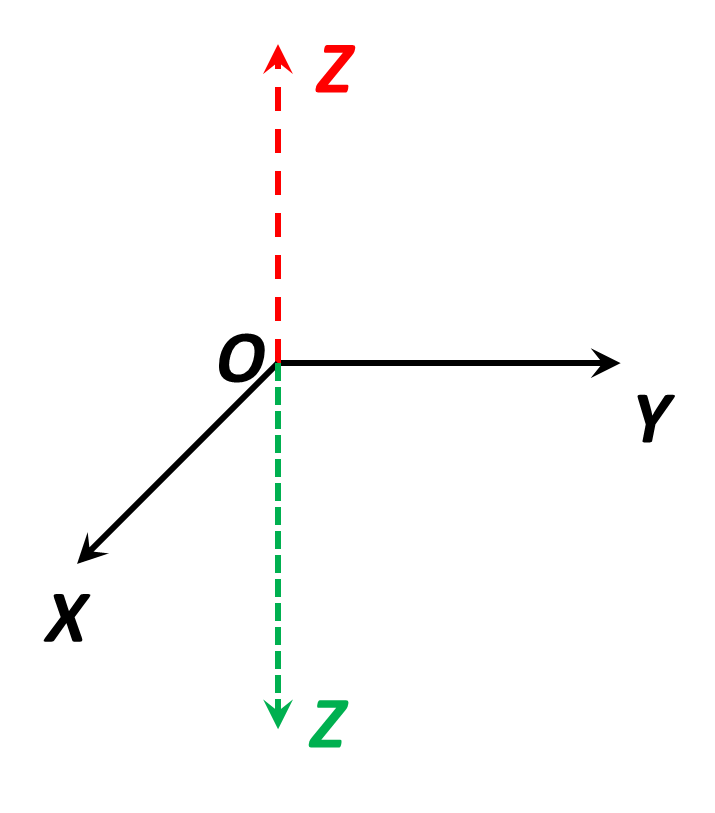
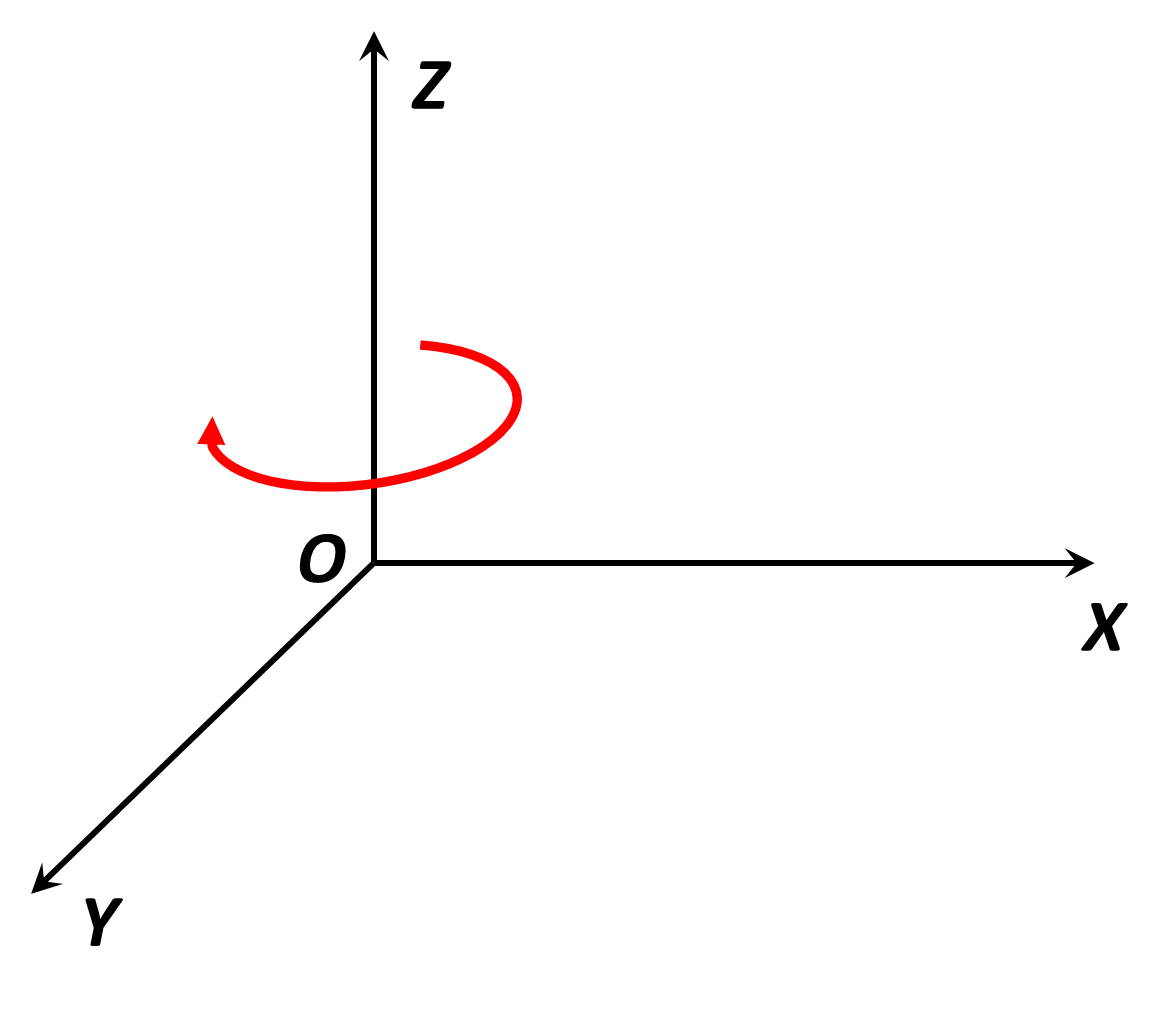
Pojęcie prawoskrętnego układu jest związane z wzajemnym położeniem trzech osi w kartezjańskim układzie współrzędnych. Otóż osie \(Ox\) i \(Oy\) tworzą pewną płaszczyznę. Trzecia oś \(Oz\) jest prostopadła do płaszczyzny \(Oxy\) i może być wybrana na dwa sposoby (Rys. 5). Wybór ten jednoznacznie definiuje typ układu: lewoskrętny (Rys. 5a) lub prawoskrętny (Rys. 5b).
{kind=link}
{kind=link}
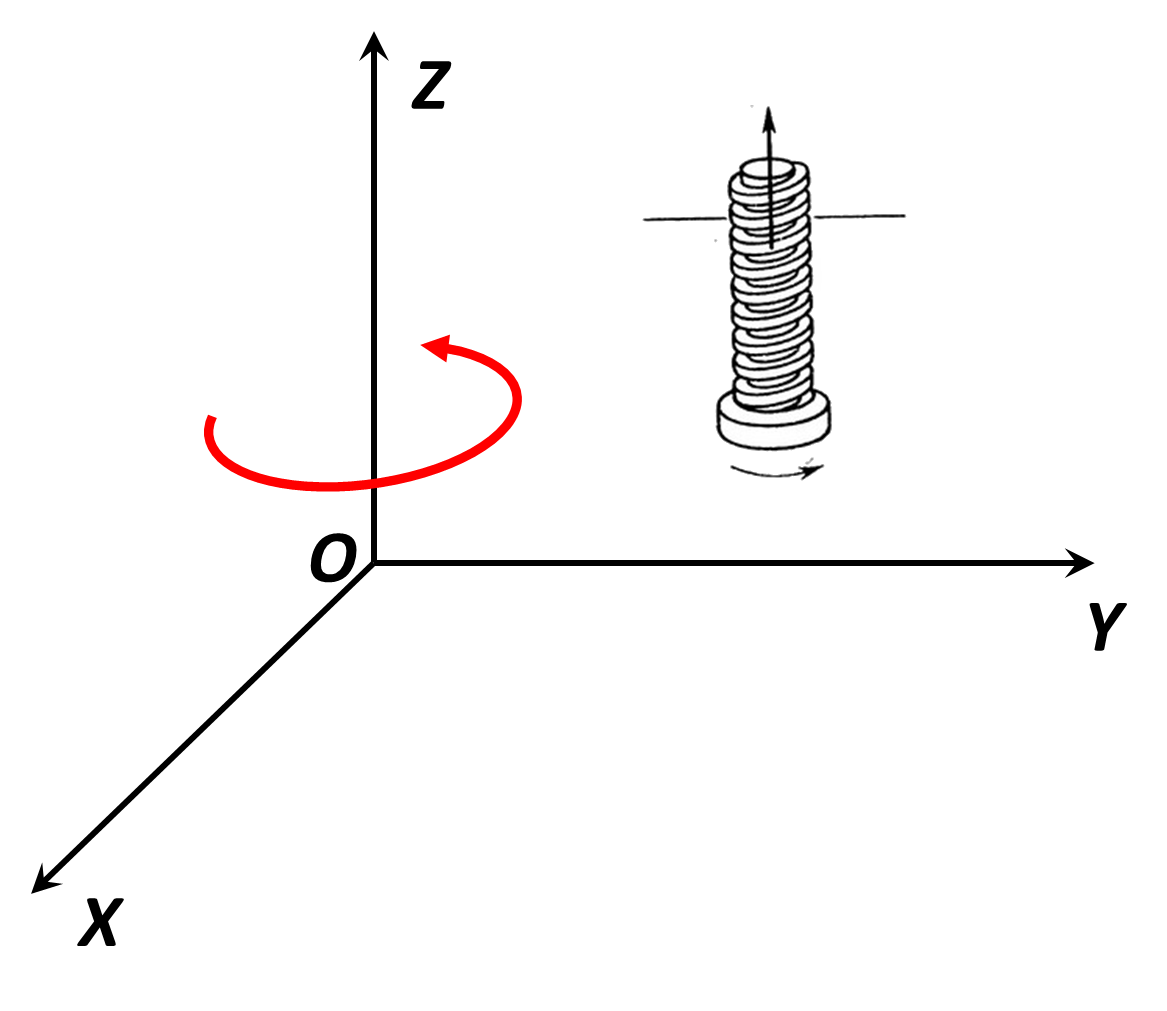{kind=link}



Niektóre pożyteczne własności iloczynów wektorów
- \(\textbf{a} \cdot \textbf{b}=\textbf{b}\cdot\textbf{a}\) prawo przemienności dla iloczynu skalarnego,
- \(\alpha (\textbf{a}\cdot\textbf{b})=(\alpha \textbf{a})\cdot \textbf{b}= \textbf{a}\cdot (\alpha \textbf{b})\),
- \(\alpha (\textbf{a} \times \textbf{b}) = (\alpha \textbf{a}) \times \textbf{b}=\textbf{a}\times (\alpha \textbf{b})\),
- \(\textbf{a}\cdot(\textbf{b}+\textbf{c}) = \textbf{a}\cdot\textbf{b} + \textbf{a}\cdot\textbf{c}\),
- \( \textbf{a} \times (\textbf{b} + \textbf{c}) = \textbf{a} \times \textbf{b} + \textbf{a} \times \textbf{c}\),
- \(\textbf{a}\cdot\textbf{b} = 0\) jeżeli \(\textbf{a} \bot \textbf{b}\) (warunek prostopadłości wektorów),
- \( \textbf{a}\cdot\textbf{a} = \textbf{a}^{2} = |\textbf{a}|^{2} \),
- \(\textbf{b}\times\textbf{a}=-\textbf{a}\times\textbf{b}\)
- \(\textbf{a}\times\textbf{a}=0\)
Wektor w kartezjańskim prostokątnym układzie współrzędnych
Składowe wektora w kartezjańskim prostokątnym układzie współrzędnych


W kartezjańskim prostokątnym układzie współrzędnych możemy określić trzy wektory nazywane wektorami podstawowymi lub wersorami, które są wektorami jednostkowymi umieszczonymi na dodatnich osiach układu współrzędnych i wychodzą z początku tego układu. Wektory takie będziemy oznaczać \(\mathbf{\widehat{x}}, \mathbf{\widehat{y}}, \mathbf{\widehat{z}}\) (Rys. 6). Jeżeli w układzie współrzędnych wybierzemy punkt \(P\) o współrzędnych \((x,y,z)\) (Rys. 6) to wektor \(\vec{OP}\) jest równy sumie trzech wektorów \(\vec{OA},\vec{AB},\vec{BP}\), gdzie \[ \vec{OA}=a_{x}\mathbf{\widehat{x}}\] \[ \vec{AB}=a_{y}\mathbf{\widehat{y}}\] \[ \vec{BP}=a_{z}\mathbf{\widehat{z}}\]
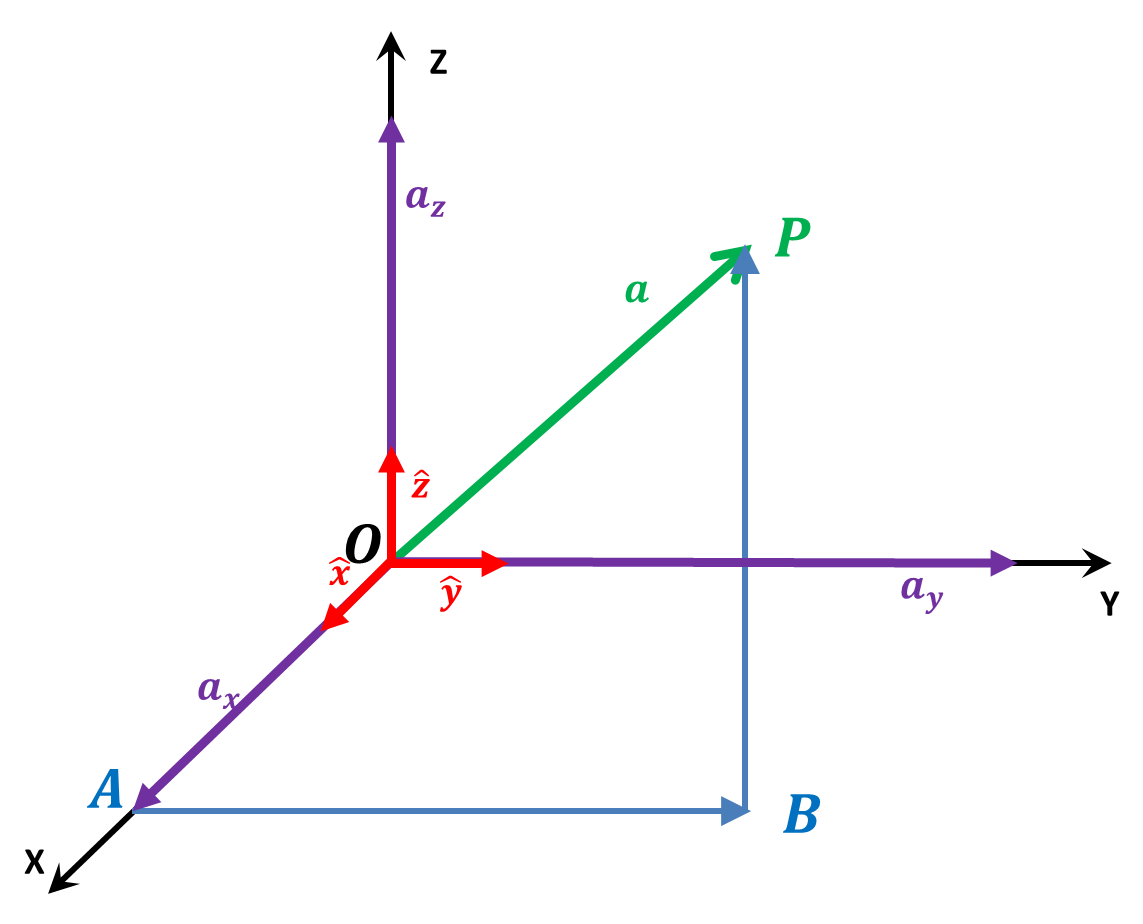{kind=link}
Podobnie, każdy wektor \(\textbf{a}\) w kartezjańskiej przestrzeni trójwymiarowej można wyrazić przez wektory podstawowe \(\mathbf{\widehat{x}}, \mathbf{\widehat{y}}, \mathbf{\widehat{z}}\)
\[\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}},\]
gdzie liczby \(a_{x},a_{y},a_{z}\) są współrzędnymi lub składowymi wektora w układzie współrzędnych (Rys. 6).
Współrzędne te są miarami rzutów wektora na osie współrzędnych \(Ox, Oy, Oz\), przy czym przesunięcie równoległe wektora nie zmienia wartości jego współrzędnych (Rys. 7).
{kind=link}
Długość wektora \(\mathbf a\) o składowych \(a_x, a_y, a_z\) może być obliczona z następującego wzoru
\[|\mathbf a| = \sqrt{a_x^2 + a_y^2 + a_z^2}.\]
Suma i różnica wektorów
Sumą wektorów \(\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}\) i \(\textbf{b}=b_{x}\mathbf{\widehat{x}}+b_{y}\mathbf{\widehat{y}}+b_{z}\mathbf{\widehat{z}}\) jest wektor \(\textbf{c}\) dany wzorem
\[\textbf{c}=c_{x}\mathbf{\widehat{x}}+c_{y}\mathbf{\widehat{y}}+c_{z}\mathbf{\widehat{z}}=(a_{x}+b_{x})\mathbf{\widehat{x}}+(a_{y}+b_{y})\mathbf{\widehat{y}}+(a_{z}+b_{z})\mathbf{\widehat{z}}\]
Różnicą wektorów \(\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}\) i \(\textbf{b}=b_{x}\mathbf{\widehat{x}}+b_{y}\mathbf{\widehat{y}}+b_{z}\mathbf{\widehat{z}}\) jest wektor \(\textbf{d}\) dany wzorem
\[\textbf{d}=d_{x}\mathbf{\widehat{x}}+d_{y}\mathbf{\widehat{y}}+d_{z}\mathbf{\widehat{z}}=(a_{x}-b_{x})\mathbf{\widehat{x}}+(a_{y}-b_{y})\mathbf{\widehat{y}}+(a_{z}-b_{z})\mathbf{\widehat{z}}\]
Mnożenie wektora przez liczbę
Polega na pomnożeniu każdej składowej wektora przez tę liczbę. Iloczyn wektora \(\textbf{a}=a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}\) przez liczbę \(\alpha\) wynosi
\[\alpha \textbf{a} = \alpha (a_{x}\mathbf{\widehat{x}}+a_{y}\mathbf{\widehat{y}}+a_{z}\mathbf{\widehat{z}}) = \alpha a_{x}\mathbf{\widehat{x}}+ \alpha a_{y}\mathbf{\widehat{y}}+ \alpha a_{z}\mathbf{\widehat{z}}\]
Iloczyn skalarny wektorów
W postaci algebraicznej iloczyn skalarny wektorów \(\textbf{a}\) i \(\textbf{b}\) jest sumą iloczynów składowych każdego z wektorów:
\[\mathbf a \cdot \mathbf b = a_x b_x + a_y b_y + a_z b_z\]
Opierając się na iloczynie skalarnym możemy przedstawić długość wektora jako równą pierwiastkowi kwadratowemu z iloczynu skalarnego wektora przez siebie
\[|\mathbf a| = \sqrt{\mathbf a \cdot \mathbf a}\]
Iloczyn wektorowy wektorów

W postaci algebraicznej iloczyn wektorowy wektorów \(\textbf{a}\) i \(\textbf{b}\) jest określany jako:
\[\textbf{a} \times \textbf{b} = (a_y b_z - a_z b_y)\mathbf{\widehat{x}} + (a_z b_x - a_x b_z)\mathbf{\widehat{y}} + (a_x b_y - a_y b_x)\mathbf{\widehat{z}}= \left| \begin{array}{ccc} \mathbf{\widehat{x}} & \mathbf{\widehat{y}} & \mathbf{\widehat{z}}\\ a_{x} & a_{y} & a_{z} \\ b_{x} & b_{y} & b_{z} \\ \end{array} \right|\]
gdzie wyznacznik jest wyliczony przez rozwinięcie względem pierwszego wiersza.
Graficzna prezentacja iloczynu wektorowego znajduje się na Rys. 8.
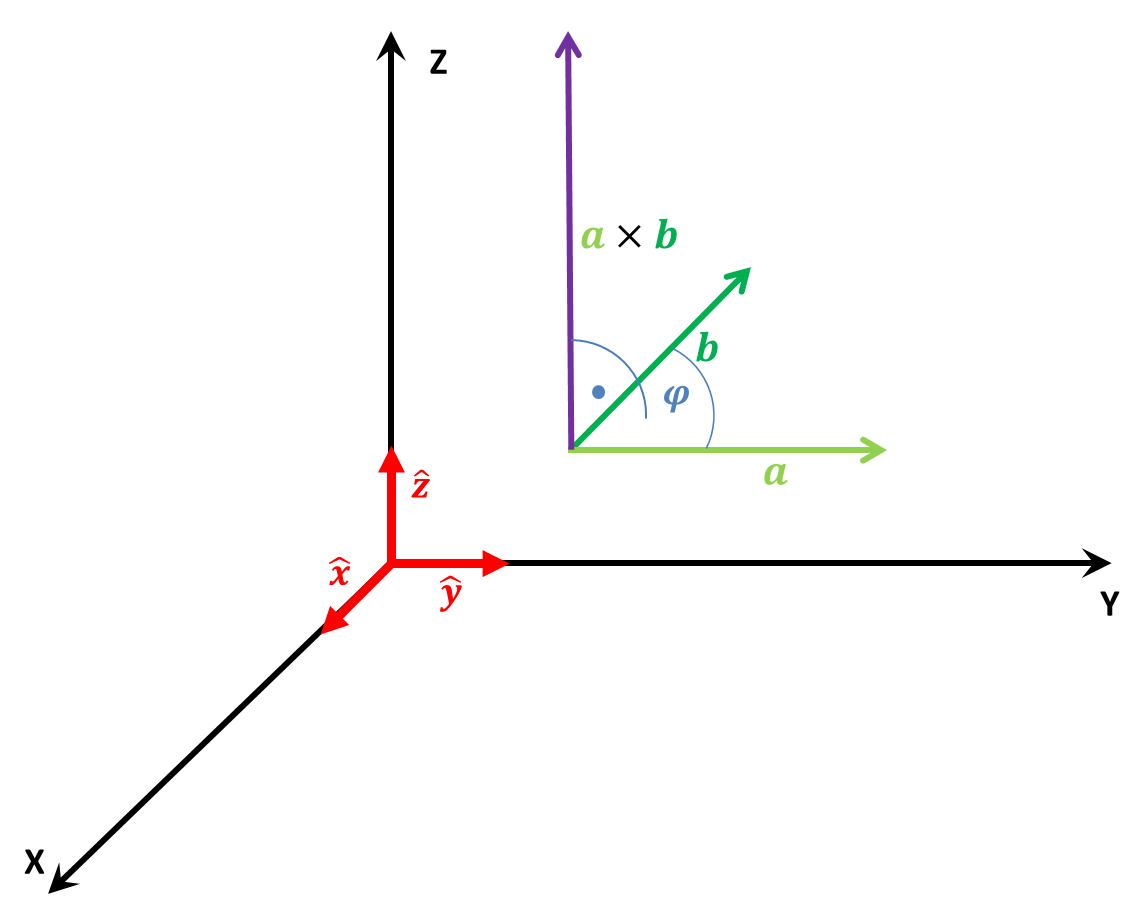{kind=link}
Przykłady


Mamy dane dwa wektory
\(\textbf{a}=3\mathbf{\widehat{x}}+4\mathbf{\widehat{y}}\)
\(\textbf{b}=2\mathbf{\widehat{x}}-\mathbf{\widehat{y}}\)
Można zauważyć, że składowa w kierunku osi \(\textbf{Z}\) obu wektorów jest równa zero.
- Długości wektorów \(\textbf{a}\) i \(\textbf{b}\) wynoszą
\(|\mathbf a| = \sqrt{3^2 + 4^2}=\sqrt{25}=5\)
\(|\mathbf b| = \sqrt{2^2 + (-1)^2}=\sqrt{5}\)
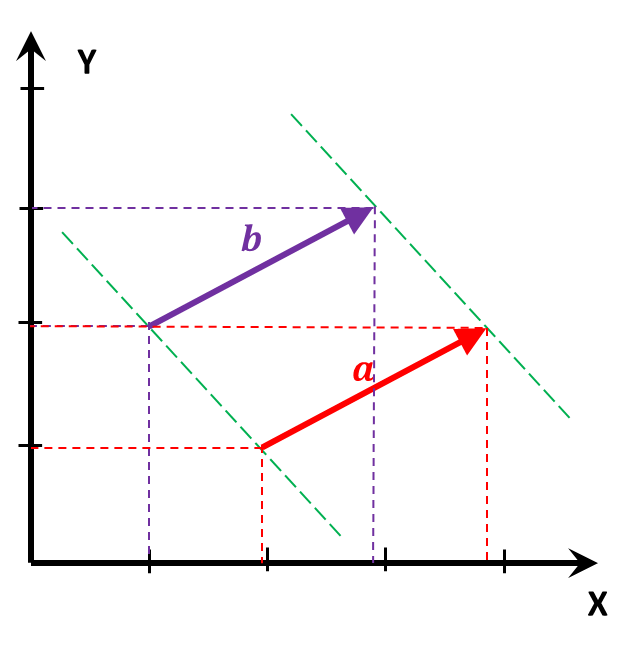
- Suma tych wektorów wynosi (patrz Rys. 9)
{kind=link}
\(\textbf{a}+\textbf{b}=(3+2)\mathbf{\widehat{x}}+(4+(-1))\mathbf{\widehat{y}}=5\mathbf{\widehat{x}}+3\mathbf{\widehat{y}}\)
- ich różnica (patrz Rys. 9)
\(\textbf{a}-\textbf{b}=(3-2)\mathbf{\widehat{x}}+(4-(-1))\mathbf{\widehat{y}}=\mathbf{\widehat{x}}+5\mathbf{\widehat{y}}\)
- iloczyn skalarny
\(\mathbf a \cdot \mathbf b = 3\cdot 2 + 4 \cdot (-1)=2\)
- a iloczyn wektorowy (patrz Rys. 10)
{kind=link}
\(\textbf{a} \times \textbf{b} = (4 \cdot 0 - 0 \cdot (-1))\mathbf{\widehat{x}} + (0 \cdot 2 - 3 \cdot 0)\mathbf{\widehat{y}} + (3 \cdot (-1) - 4 \cdot 2)\mathbf{\widehat{z}}=-11\mathbf{\widehat{z}}\)
Zadania
- Czy wektory \(\vec{AB}\) i \(\vec{CD}\) gdzie \( A =(2,-1), B=(2,1), C=(3,-2), D=(-3,-2)\) są przeciwne?
- Czy wektory \(\vec{AB}\) i \(\vec{CD}\) gdzie \( A =(2,-1), B=(-2,-2), C=(1,-1), D=(1,2)\) są równe?
- Oblicz długości boków trójkąta o wierzchołkach \(A=(1,-1,2), B=(3,3,8), C=(2,0,1)\).
- Jeżeli \(A = (2, -1), B = (-1, 3), C = (0, 1)\), wyraź następujące wektory w układzie opartym na wektorach jednostkowych \(\mathbf{\widehat{x}},\mathbf{\widehat{y}}\):
- \(\vec{AB}\),
- \(\vec{BC}\),
- \(\vec{AC}\),
- \(\vec{AB}+\vec{BC}\),
- \(2\vec{AC}-3\vec{BC}\),
- Jeżeli \(\textbf{a} = 2\mathbf{\widehat{x}} + \mathbf{\widehat{y}} -2\mathbf{\widehat{z}}\) i \(\textbf{b} = 3\mathbf{\widehat{x}} - 2\mathbf{\widehat{y}} - \mathbf{\widehat{z}} \) znajdź:
- \(\textbf{a} + \textbf{b}\),
- \(\textbf{a} - \textbf{b}\),
- \(3\textbf{a} - 2\textbf{b}\),
- \(|\textbf{a}|\),
- \(|\textbf{b}|\).
- Pokaż, że:
- \(\mathbf{\widehat{x}} \times \mathbf{\widehat{x}} = \textbf{0} \),
- \(\mathbf{\widehat{x}} \times \mathbf{\widehat{y}} = \mathbf{\widehat{z}} \),
- \(\mathbf{\widehat{y}} \times \mathbf{\widehat{x}} = -\mathbf{\widehat{z}} \),