Z Skrypty dla studentów Ekonofizyki UPGOW
Będziemy teraz rozważać wektory, przy czym ograniczymy się do wektorów w przestrzeni dwu- i trzywymiarowej, w której wprowadzimy współrzędne kartezjańskie prostokątne. Wektory możemy definiować w sposób geometryczny (wektor ma punkt przyłożenia, kierunek, zwrot i długość) lub w sposób algebraiczny (wektor ma współrzędne, czyli składowe). Istnieje nieskończenie wiele wektorów określonych przez współrzędne (składowe), które odpowiadają temu samemu wektorowi o określonym kierunku, wartości i zwrocie. Przez podanie punktu przyłożenia z rodziny wektorów o tych samych współrzędnych (składowych) wybieramy jeden. Dla przykładu w zastosowaniach fizycznych wektor siły posiada punkt przyłożenia w punkcie działania siły.
Spis treści |
Wielkości wektorowe i skalarne
Wielkości, których wartości mogą być tylko jedną liczbą nazywamy wielkościami skalarnymi (np. masa, temperatura, energia, praca). Wielkości, do których określenia wymagane jest podanie nie tylko ich wartości, ale także kierunku, zwrotu i punktu przyłożenia w przestrzeni nazywamy wielkościami wektorowymi (np. siła, prędkość, przyspieszenie) i przedstawiamy je za pomocą wektorów.
Współrzędne kartezjańskie prostokątne
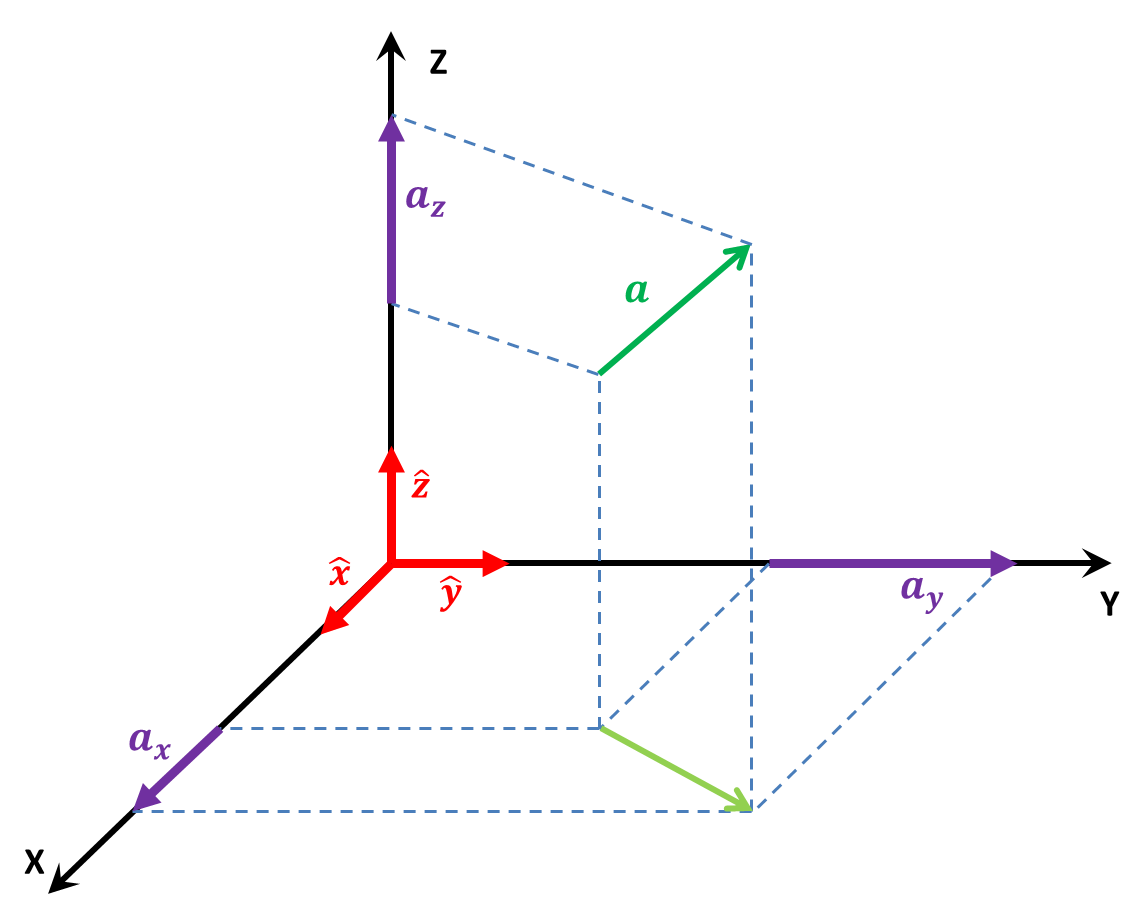
Każdy wektor \(\textbf{a}\) w karteziańskiej przestrzeni trójwymiarowej może być jednoznacznie rozłożony na sumę wektorów równoległych do wersorów \(\widehat{x}, \widehat{y}, \widehat{z }\), które są wektorami o długości jednostkowej wzdłuż kolejnych osi układu współrzędnych:
\(\textbf{a}=a_{x}\widehat{x}+a_{y}\widehat{y}+a_{z}\widehat{z}\)
skalary \(a_{x},a_{y},a_{z}\) są współrzędnymi wektora w układzie kartezjańskim (Rys. 1).
{kind=link}
Współrzędne te są miarami rzutów wektora na osie współrzędnych \(Ox, Oy, Oz\), przy czym przesunięcie równoległe wektora nie zmienia wartości jego współrzędnych.

Dla współrzędnych sumy lub różnicy wektorów \(\textbf{c}=\textbf{a} \pm \textbf{b}\) zachodzi prosty związek:
\[c_{x} = a_{x} \pm b_{x}\] \[c_{y} = a_{y} \pm b_{y}\] \[c_{z} = a_{z} \pm b_{z}\]
Długość wektora \(\mathbf a\) (oznaczamy ją jako \(|\textbf{a}|\) (której nie powinno się mieszać z wartością bezwzględną)) składowych \(a_x, a_y, a_z\) może być obliczona z następującego wzoru
\[|\mathbf a| = \sqrt{a_x^2 + a_y^2 + a_z^2}.\]
Jak widać jest ona równa pierwiastkowi kwadratowemu z iloczynu skalarnego wektora przez siebie
\[|\mathbf a| = \sqrt{\mathbf a \cdot \mathbf a}.\]
Suma i różnica wektorów
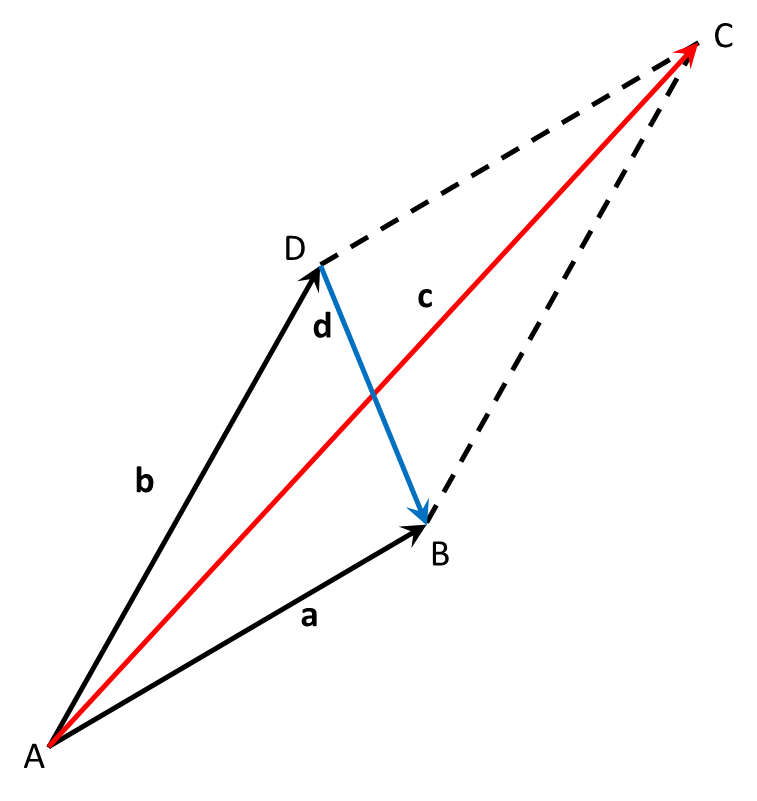
Sumą wektorów \(\textbf{a}=a_{x}\widehat{x}+a_{y}\widehat{y}+a_{z}\widehat{z}\) i \(\textbf{b}=b_{x}\widehat{x}+b_{y}\widehat{y}+b_{z}\widehat{z}\) jest wektor \(\textbf{c}\) dany wzorem
\[\textbf{c}=c_{x}\widehat{x}+c_{y}\widehat{y}+c_{z}\widehat{z}=(a_{x}+b_{x})\widehat{x}+(a_{y}+b_{y})\widehat{y}+(a_{z}+b_{z})\widehat{z}\] Graficzne przedstawienie sumy dwóch wektorów znajduje się na rysunku Rys. 2.
{kind=link}
Dla sumy wektorów zachodzą następujące wzory:
- \(\textbf{a}+\textbf{b}=\textbf{b}+\textbf{a}\)
- \(|\textbf{a}|+|\textbf{b}| \geq |\textbf{a}+\textbf{b}| \)
Różnicą wektorów \(\textbf{a}=a_{x}\widehat{x}+a_{y}\widehat{y}+a_{z}\widehat{z}\) i \(\textbf{b}=b_{x}\widehat{x}+b_{y}\widehat{y}+b_{z}\widehat{z}\) jest wektor \(\textbf{d}\) dany wzorem
\[\textbf{d}=d_{x}\widehat{x}+d_{y}\widehat{y}+d_{z}\widehat{z}=(a_{x}-b_{x})\widehat{x}+(a_{y}-b_{y})\widehat{y}+(a_{z}-b_{z})\widehat{z}\] Graficzne przedstawienie róznicy dwóch wektorów znajduje się na rysunku Rys. 2.
Własności różnicy wektorów:
- \(\textbf{a}-\textbf{a} = 0\) wektor zerowy.

Mnożenie wektora przez liczbę
Polega na pomnożeniu każdej składowej wektora przez tę liczbę. I tak iloczyn wektora \(\textbf{a}=a_{x}\widehat{x}+a_{y}\widehat{y}+a_{z}\widehat{z}\) przez liczbę \(\alpha\) wynosi
\[\alpha \textbf{a} = \alpha (a_{x}\widehat{x}+a_{y}\widehat{y}+a_{z}\widehat{z}) = \alpha a_{x}\widehat{x}+ \alpha a_{y}\widehat{y}+ \alpha a_{z}\widehat{z}\]
Wektor \(\alpha \textbf{a}\) posiada:
- ten sam kierunek i zwrot co wektor \(\textbf{a}\) dla \(\alpha \gt 0\),
- ten sam kierunek i przeciwny zwrot co wektor \(\textbf{a}\) dla \(\alpha \lt 0\),
- jest wektorem zerowym gdy \(\alpha = 0.\)
Iloczyn skalarny i wektorowy wektorów
Iloczyn skalarny wektorów
Iloczynem skalarnym \(\textbf{a} \cdot \textbf{b}\) wektorów \(\textbf{a}\) i \(\textbf{b}\) nazywamy liczbę rzeczywistą, która definiujemy następująco
\[\mathbf a \cdot \mathbf b=|\textbf{a}||\textbf{b}|cos(\varphi)\]
gdzie \(\varphi\) jest kątem między wektorami \(\textbf{a}\) i \(\textbf{b}\), który mierzymy od wektora \(\textbf{a}\) do wektora \(\textbf{b}\). To była definicja iloczynu skalarnego w postaci geometrycznej. W postaci algebraicznej iloczyn skalarny wktorów \(\textbf{a}\) i \(\textbf{b}\) jest definiowany jako suma iloczynów składowych każdego z wektoróq:
\[\mathbf a \cdot \mathbf b = a_x b_x + a_y b_y + a_z b_z\].
Iloczyn wektorowy wektorów
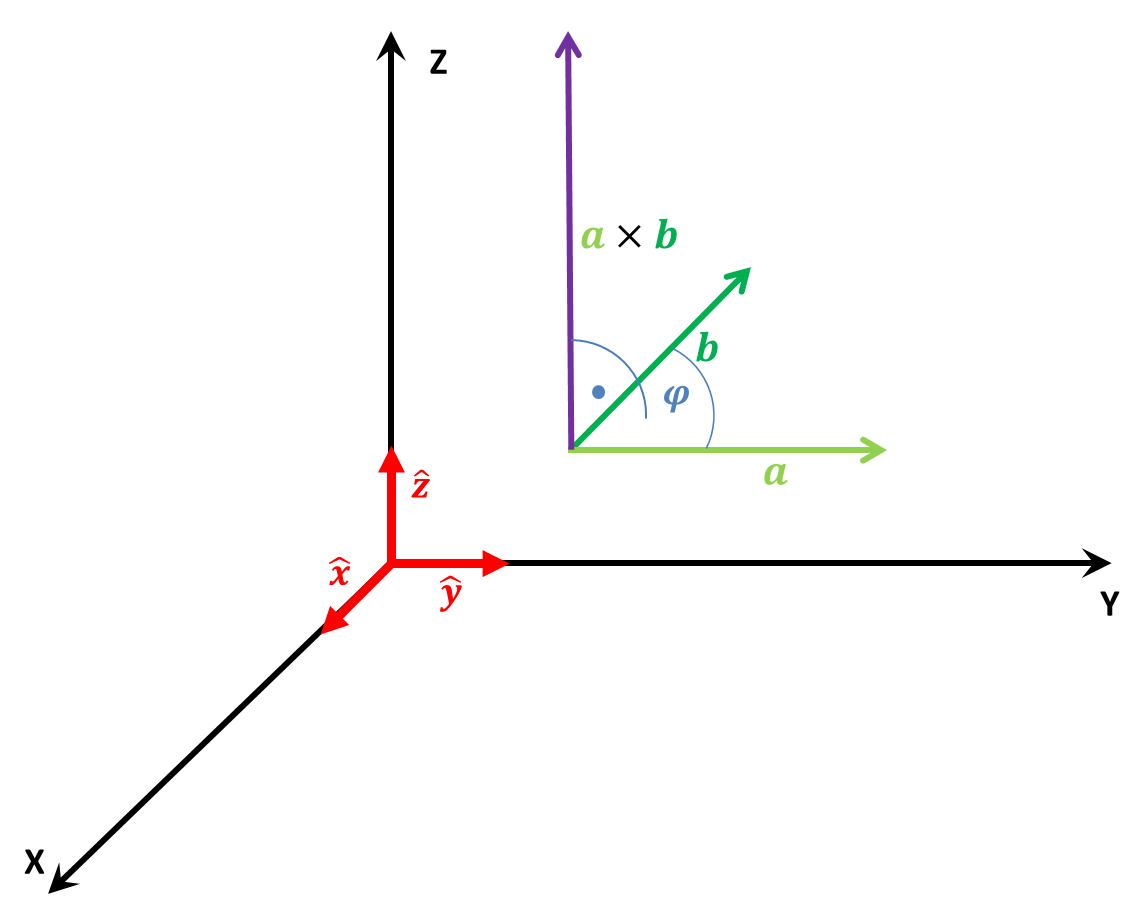
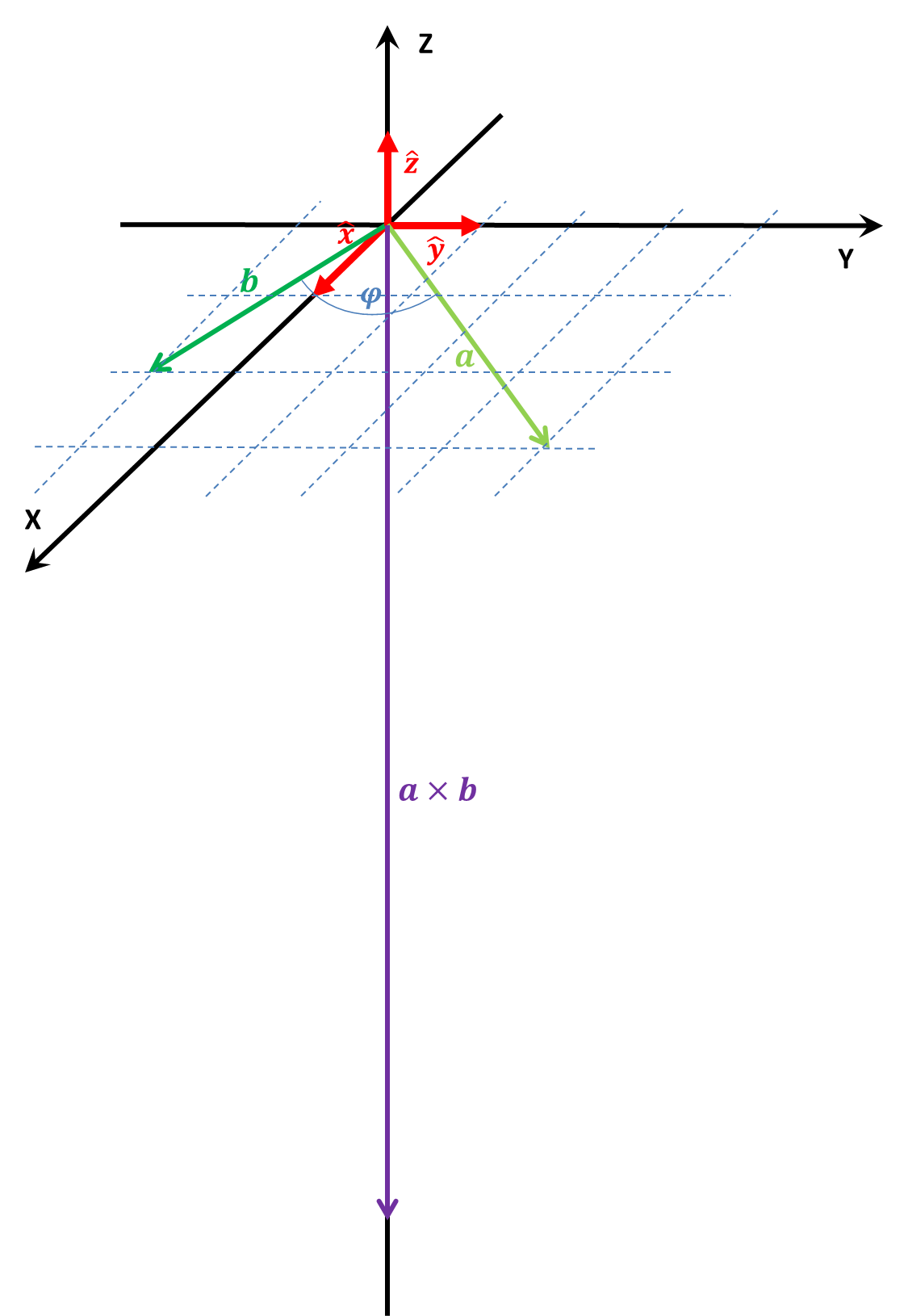
Iloczynem wektorowym \(\textbf{a} \times \textbf{b}\) wektora \(\textbf{a}\) przez wektor \(\textbf{b}\) nazywamy wektor \(\textbf{c}\), którego długość wynosi:
\[|\textbf{c}|=|\textbf{a}||\textbf{b}|sin(\varphi)\]
gdzie kąt \(\varphi\) jest mierzony od wektora \(\textbf{a}\) do wektora \(\textbf{b}\) w taki sposób, że jest \(\leq \pi\). Wektor \(\textbf{c}\) jest tak zorientowany, że wektory \(\textbf{a}, \textbf{b}, \textbf{c}\) tworzą układ prawoskrętny.
To była geometryczna definicja iloczynu wektorowego,a w postaci algebraicznej lloczyn wektorowy wektorów \(\textbf{a}\) i \(\textbf{b}\) definiujemy jako:
\[\textbf{a} \times \textbf{b} = (a_y b_z - a_z b_y)\widehat{x} + (a_z b_x - a_x b_z)\widehat{y} + (a_x b_y - a_y b_x)\widehat{z}\].
Graficzna prezentacja iloczynu wektorowego znajduje się na rysunku Rys. 3.
{kind=link}

Niektóre pożyteczne własności iloczynów wektorów
- \(\textbf{ab}=\textbf{ba}\) prawo przemienności dla iloczynu skalarnego,
- \(\alpha (\textbf{ab})=(\alpha \textbf{a})\textbf{b}\),
- \(\alpha (\textbf{a} \times \textbf{b}) = (\alpha \textbf{a}) \times \textbf{b}\),
- \(\textbf{a}(\textbf{b}+\textbf{c}) = \textbf{ab} + \textbf{ac}\),
- \( \textbf{a} \times (\textbf{b} + \textbf{c}) = \textbf{a} \times \textbf{b} + \textbf{a} \times \textbf{c}\),
- \(\textbf{ab} = 0\) jeżeli \(\textbf{a} \bot \textbf{b}\) warunek prostopadłości wektorów,
- \(\textbf{a} \times \textbf{b} = \textbf{0}\) warunek kolinearności wektorów (wektory o tym samym kierunku, równoległe, mogące także leżeć na tej samej prostej),
- \( \textbf{aa} = \textbf{a}^{2} = |\textbf{a}|^{2} \) ale \( \textbf{a} \times \textbf{a} = \textbf{0}\).
Przykład


Mamy dane dwa wektory
\(\textbf{a}=3\widehat{x}+4\widehat{y}\)
\(\textbf{b}=2\widehat{x}-\widehat{y}\)
Można zauważyć, że składowa w kierunku osi \(\textbf{Z}\) jest równa zero.
- Długości wektorów \(\textbf{a}\) i \(\textbf{b}\)
\(|\mathbf a| = \sqrt{3^2 + 4^2}=\sqrt{25}=5\)
\(|\mathbf b| = \sqrt{2^2 + (-1)^2}=\sqrt{5}\)
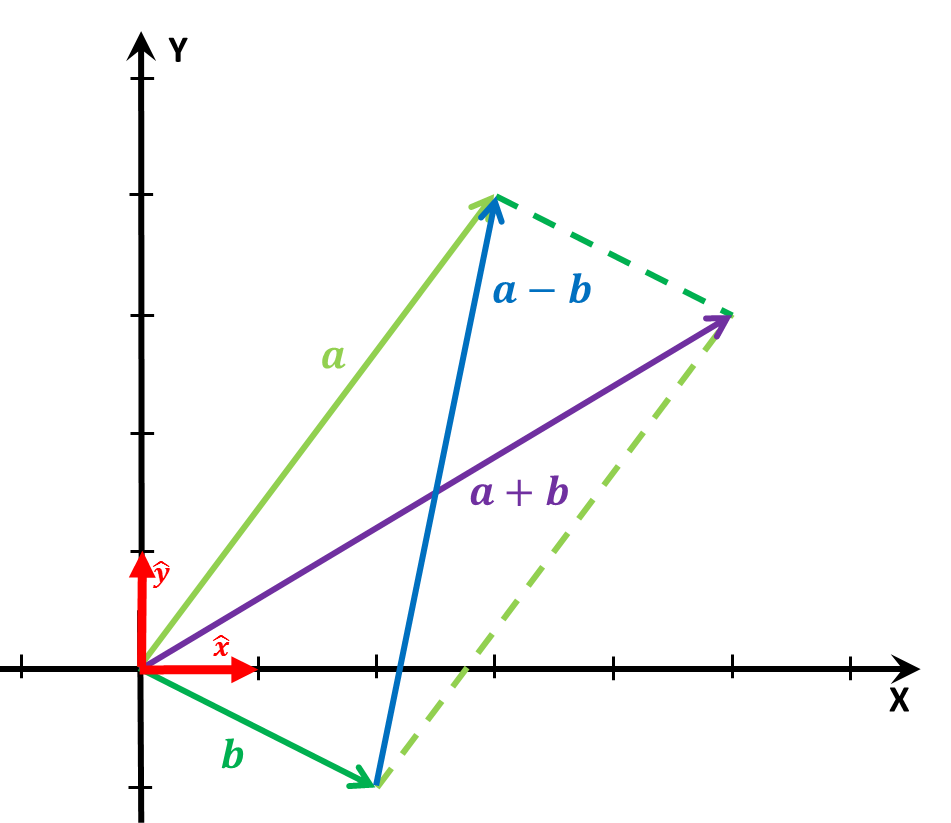
- Suma tych wektorów wynosi (patrz Rys. 4)
{kind=link}
\(\textbf{a}+\textbf{b}=(3+2)\widehat{x}+(4+(-1))\widehat{y}=5\widehat{x}+3\widehat{y}\)
- Różnica wynosi (patrz Rys. 4)
\(\textbf{a}-\textbf{b}=(3-2)\widehat{x}+(4-(-1))\widehat{y}=\widehat{x}+5\widehat{y}\)
- Iloczyn skalarny
\(\mathbf a \cdot \mathbf b = 3\cdot 2 + 4 \cdot (-1)=2\)
- Iloczyn wektorowy (patrz Rys. 5)
{kind=link}
\(\textbf{a} \times \textbf{b} = (4 \cdot 0 - 0 \cdot (-1))\widehat{x} + (0 \cdot 2 - 3 \cdot 0)\widehat{y} + (3 \cdot (-1) - 4 \cdot 2)\widehat{z}=-11\widehat{z}\)
Zadania
- Czy wektory \(\overline{AB}\) i \(\overline{CD}\) gdzie \( A =(2,-1), B=(2,1), C=(3,-2), D=(-3,-2)\) są przeciwne?
- Czy wektory \(\overline{AB}\) i \(\overline{CD}\) gdzie \( A =(2,-1), B=(-2,-2), C=(1,-1), D=(1,2)\) są równe?
- Oblicz długości boków trójkąta o wierzchołkach \(A=(1,-1,2), B=(3,3,8), C=(2,0,1)\).
- Jeżeli \(A = (2, -1), B = (-1, 3), C = (0, 1)\), wyraź następujące wektory w układzie opartym na wektorach jednostkowych \(\widehat{x},\widehat{y}\):
- \(\overline{AB}\),
- \(\overline{BC}\),
- \(\overline{AC}\),
- \(\overline{AB}+\overline{BC}\),
- \(2\overline{AC}-3\overline{BC}\),
- Jeżeli \(\textbf{a} = 2\widehat{x} + \widehat{y} -2\widehat{z}\) i \(\textbf{b} = 3\widehat{x} - 2\widehat{y} - \widehat{z} \) znajdź:
- \(\textbf{a} + \textbf{b}\),
- \(\textbf{a} - \textbf{b}\),
- \(3\textbf{a} - 2\textbf{b}\),
- \(|\textbf{a}|\),
- \(|\textbf{b}|\).
- Pokaż, że:
- \(\widehat{x} \times \widehat{x} = \textbf{0} \),
- \(\widehat{x} \times \widehat{y} = \widehat{z} \),
- \(\widehat{y} \times \widehat{x} = -\widehat{z} \),